|
7808| 0
|
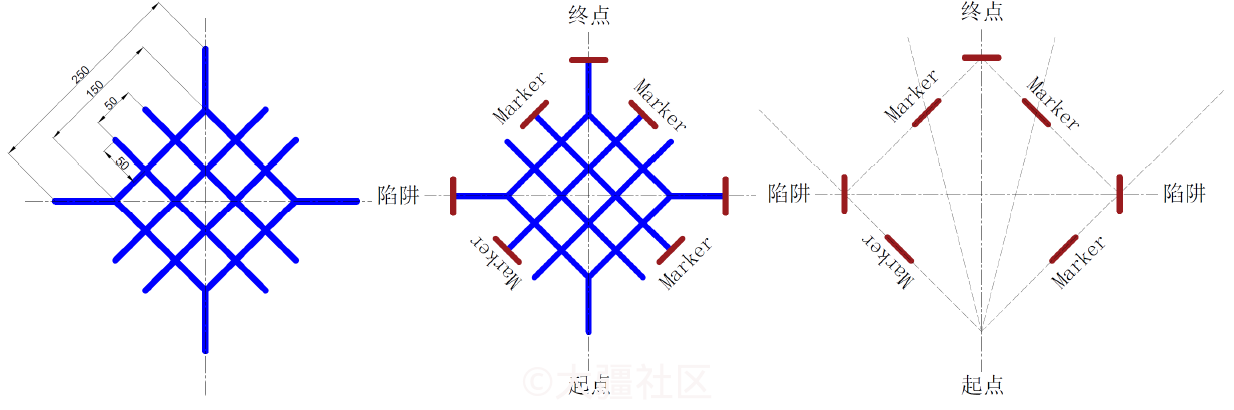
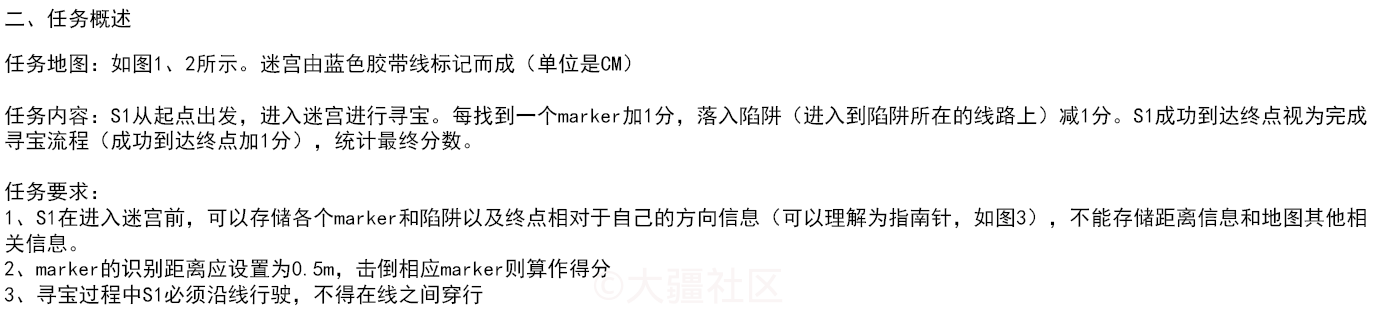
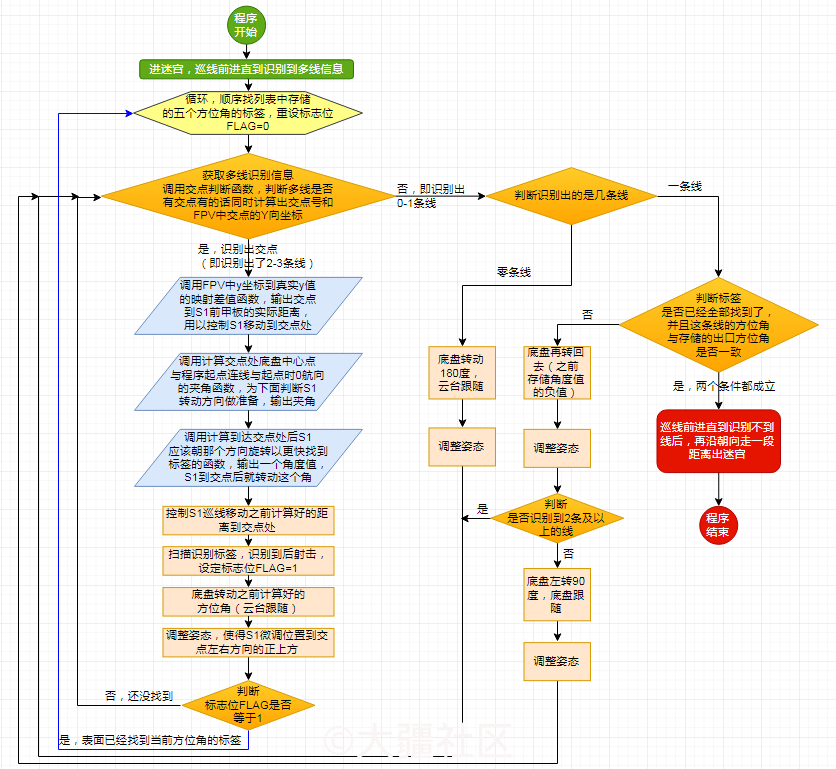
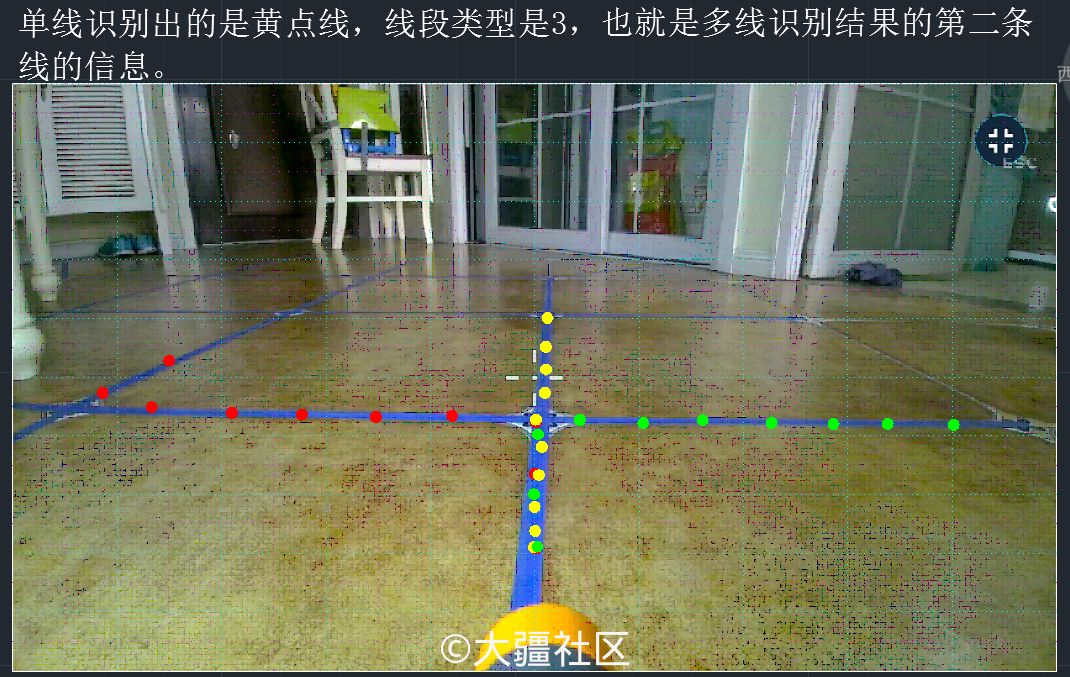
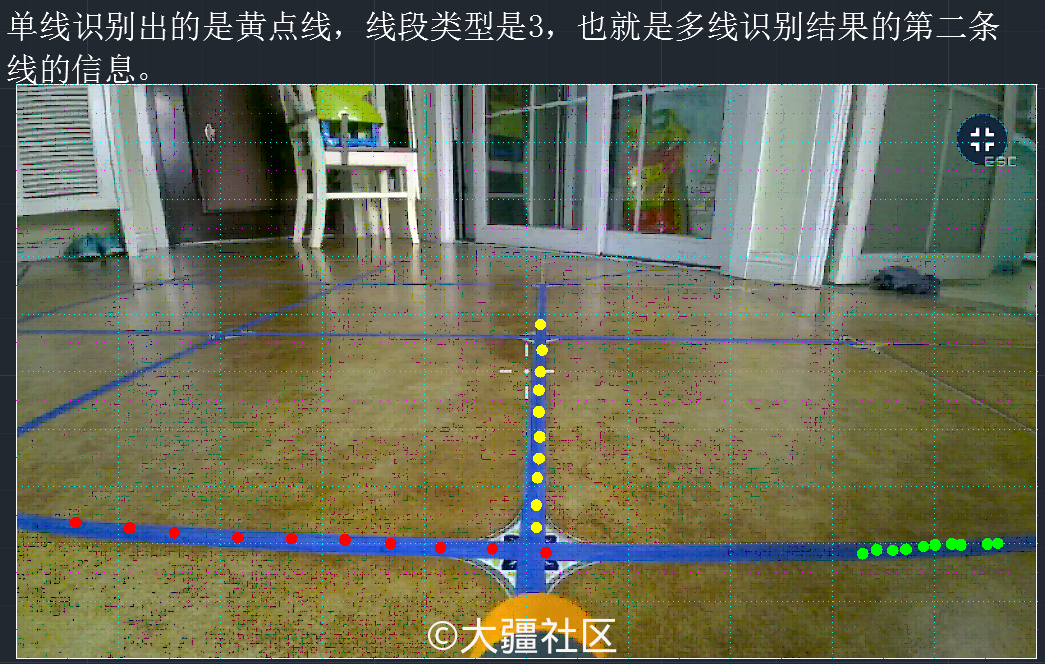
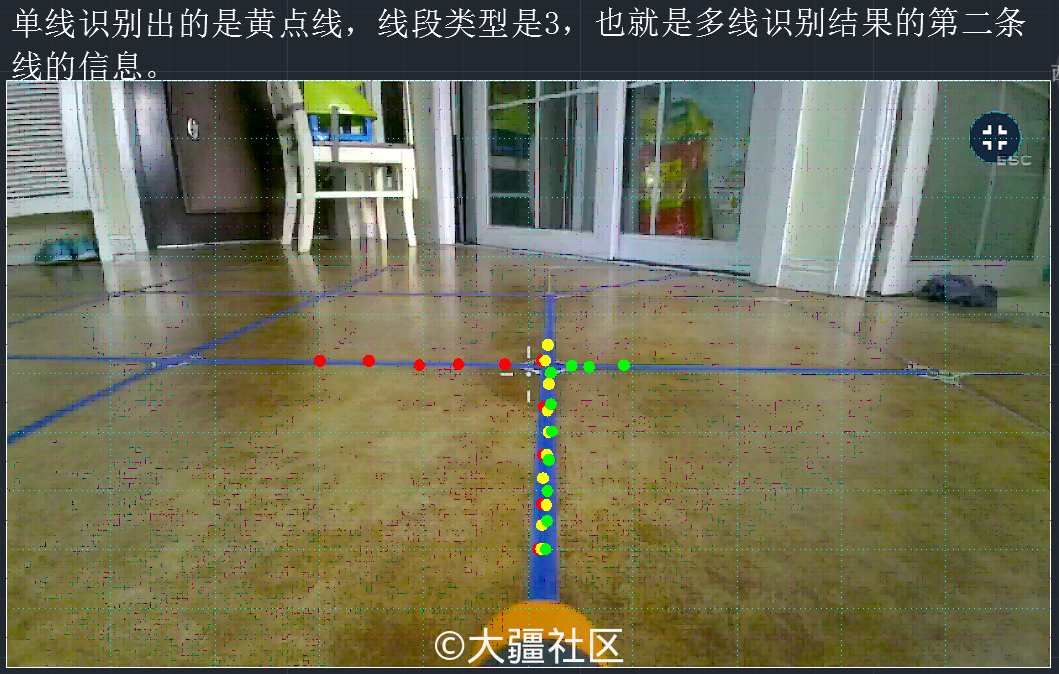
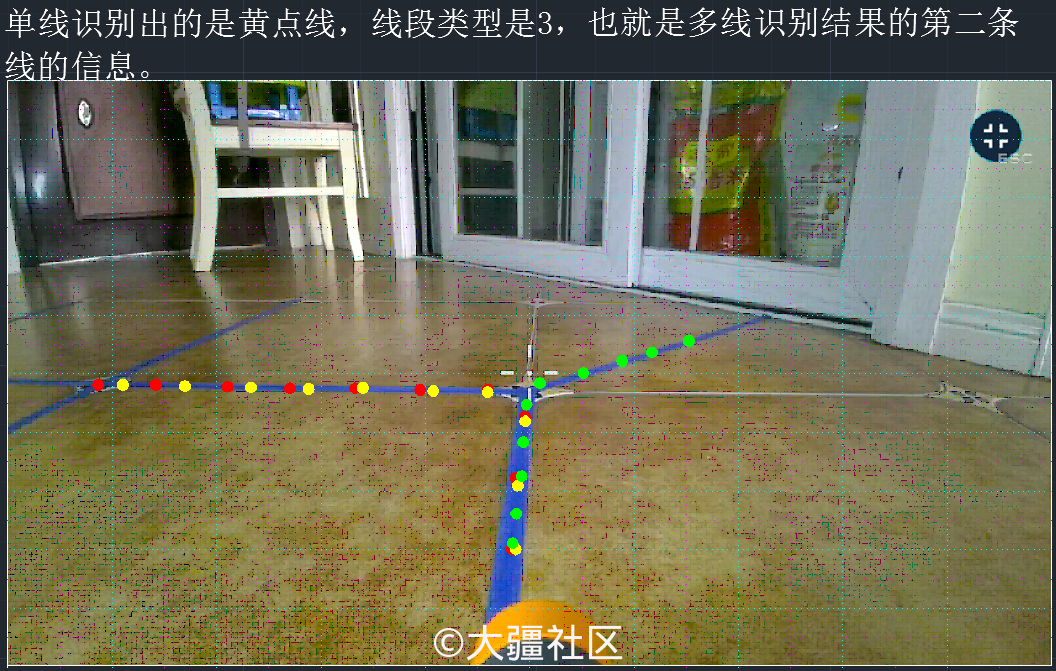
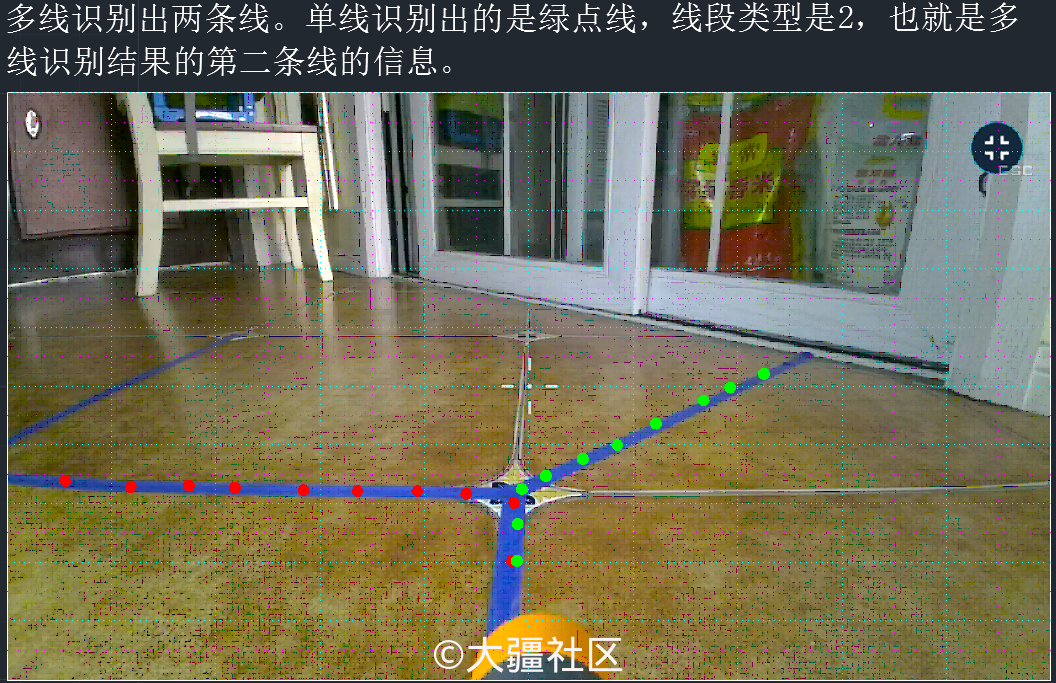
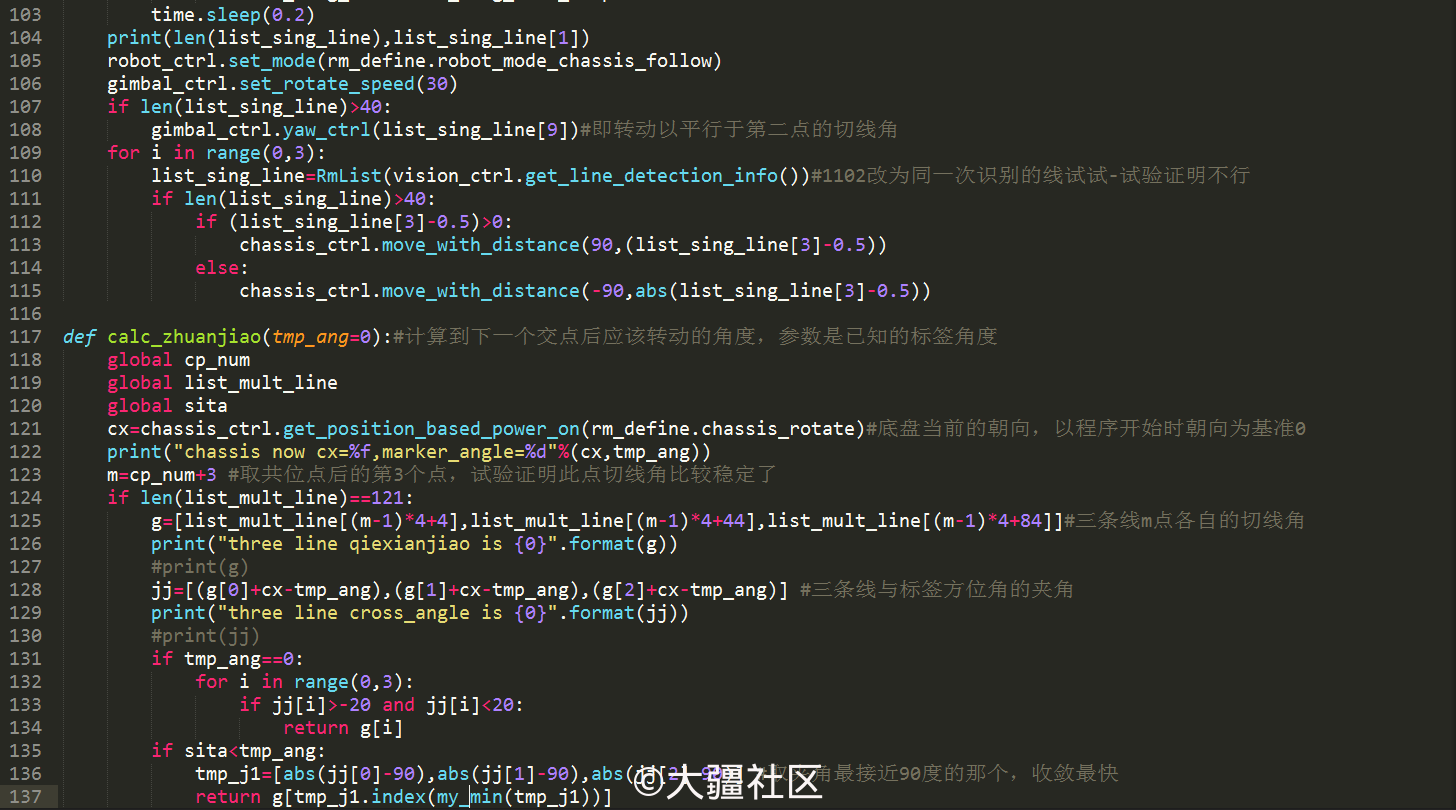
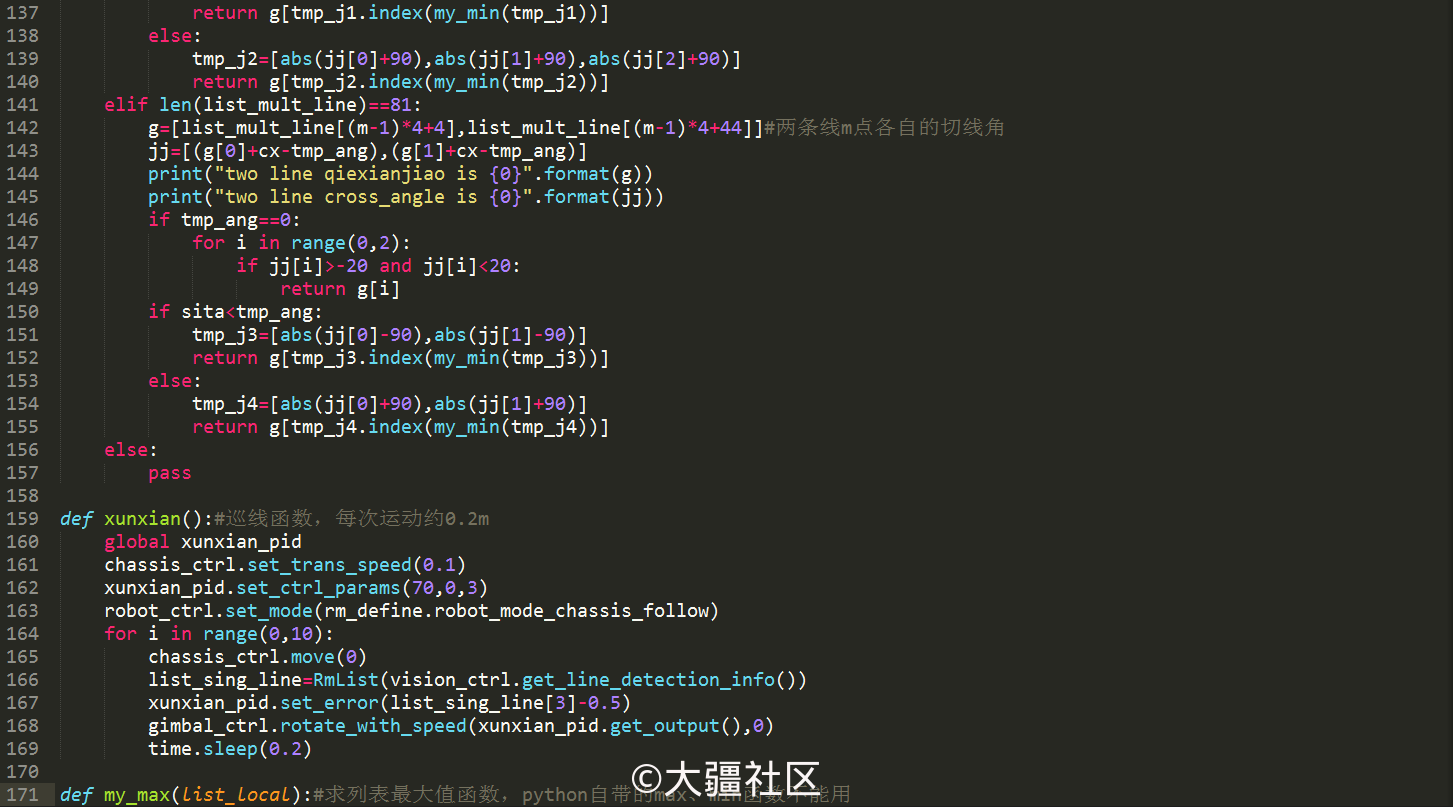
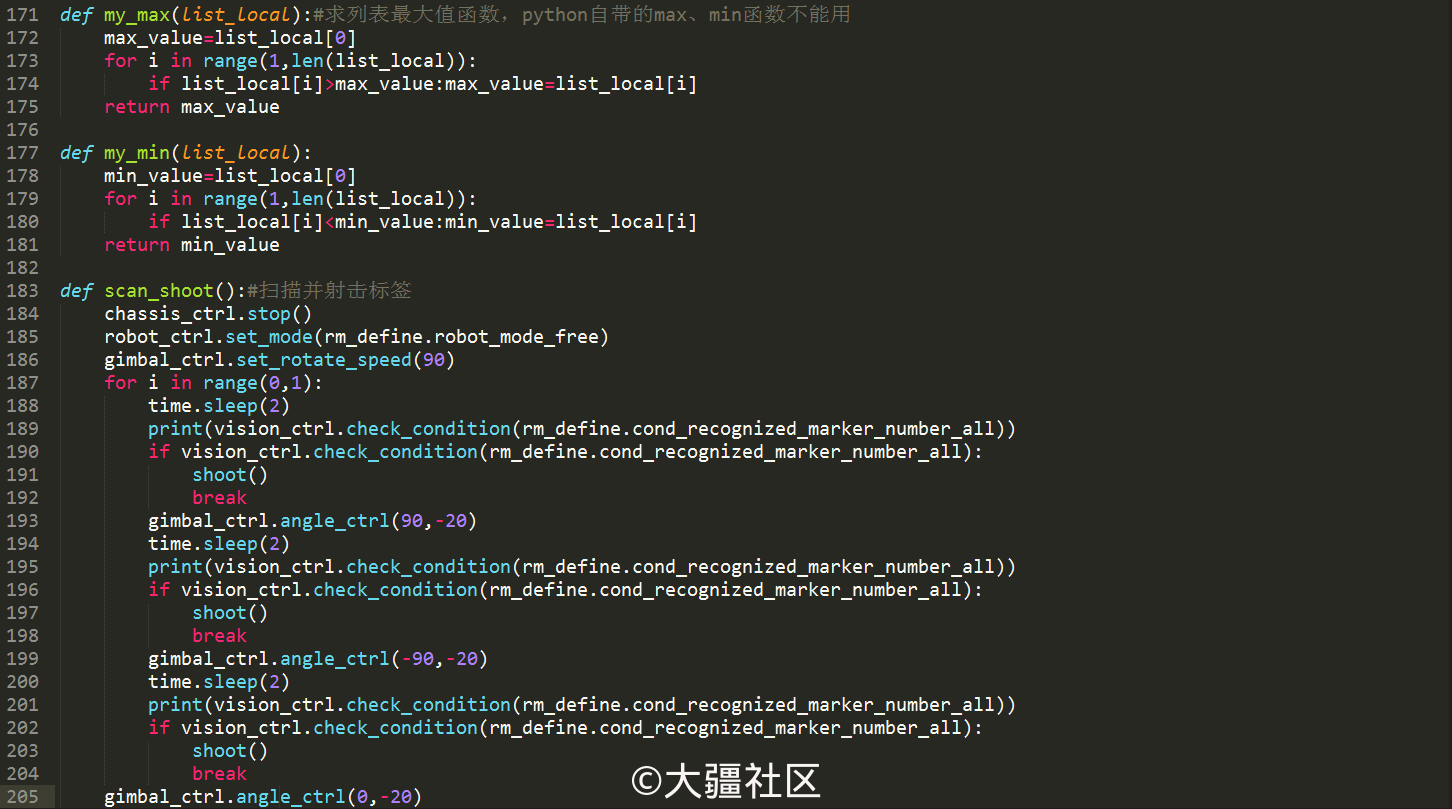
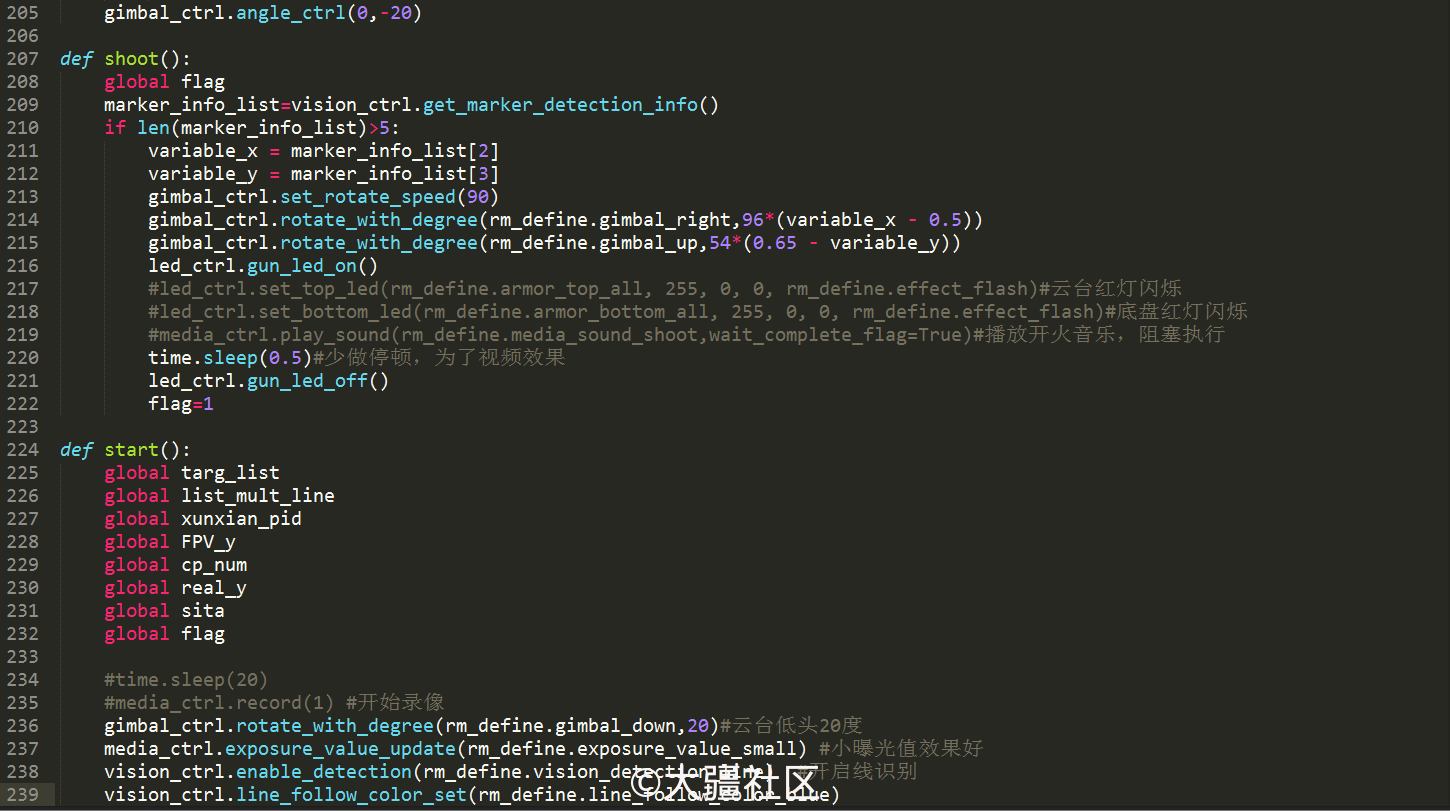
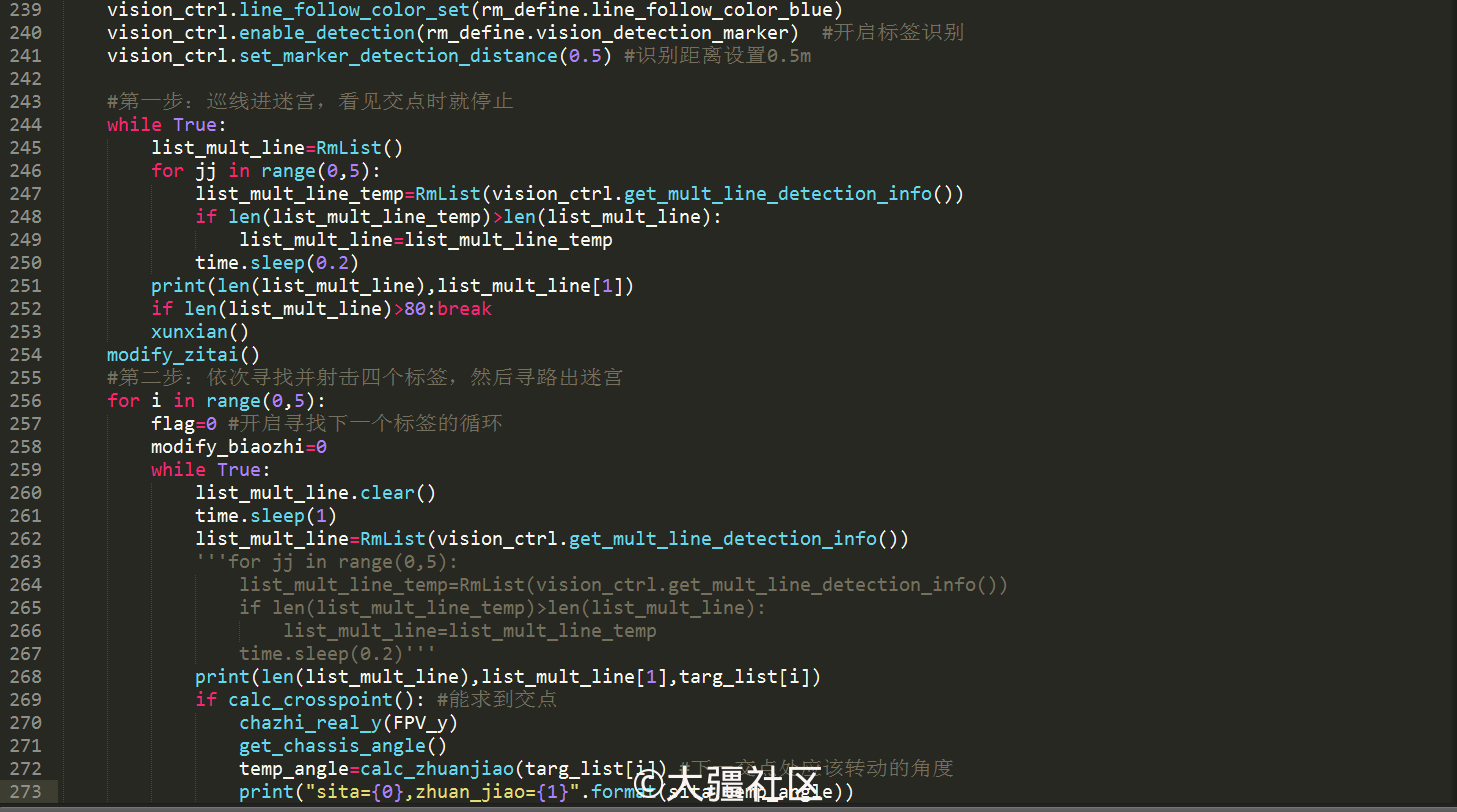
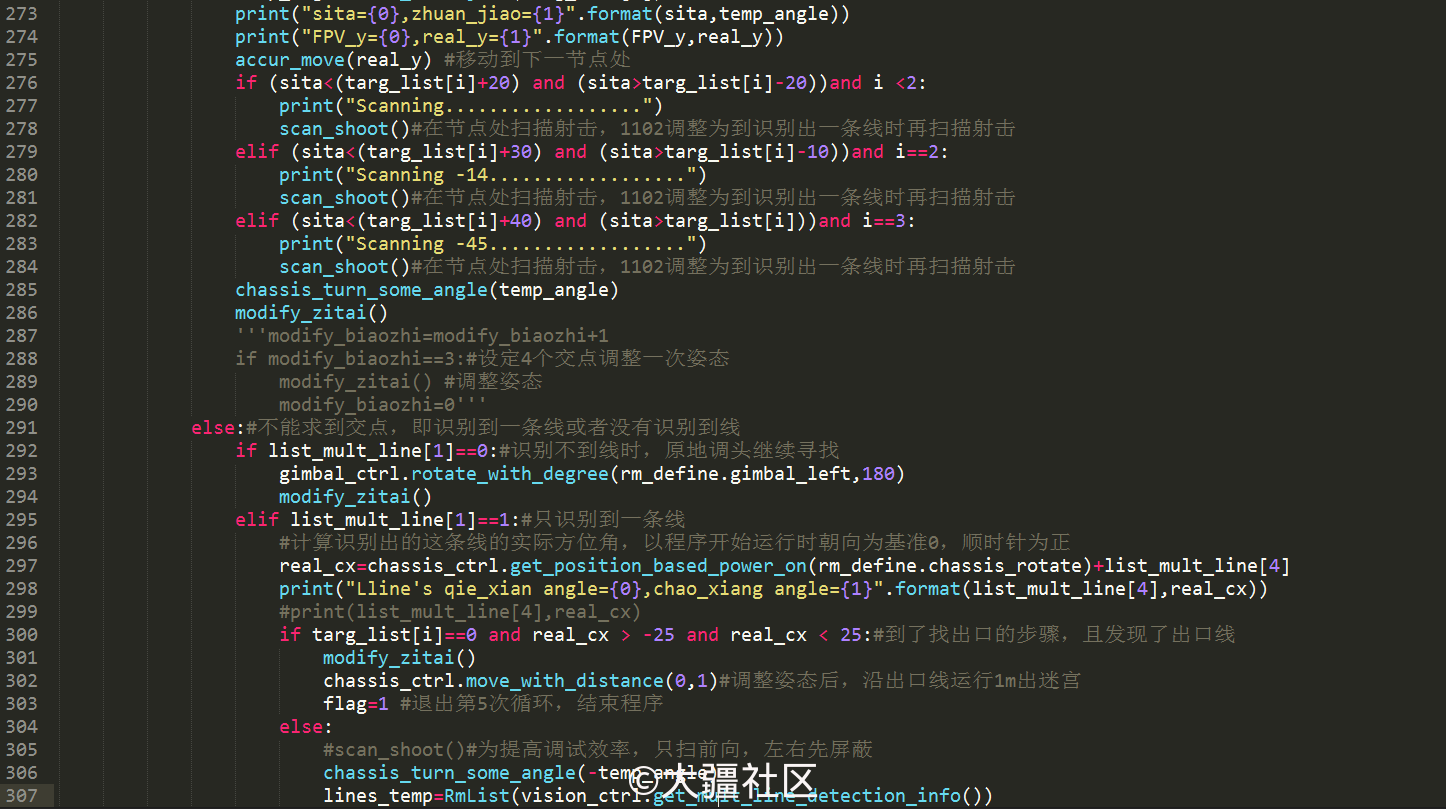
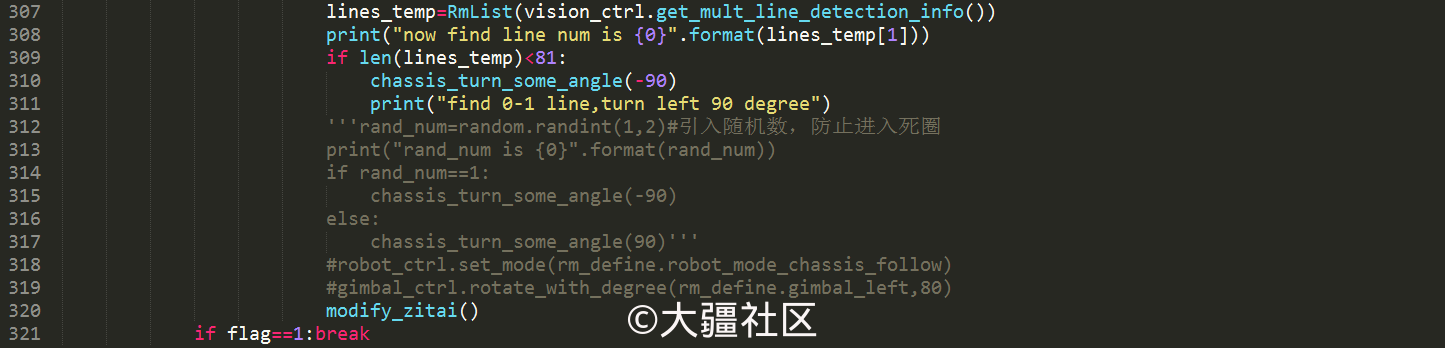
CodeMaster第三次任務+多線識別&轉角自適應==近通用算法 |
|
|
| |
 |Archiver|手機版|小黑屋|圓創力科技有限公司 IOP Robotic Technology Co.,Ltd Tel: 07-3924582 Fax: 07-3924001
|Archiver|手機版|小黑屋|圓創力科技有限公司 IOP Robotic Technology Co.,Ltd Tel: 07-3924582 Fax: 07-3924001
GMT+8, 2025-10-14 11:27 , Processed in 0.026119 second(s), 16 queries .
Powered by Discuz! X3.4
Copyright © 2001-2021, Tencent Cloud.



 IP卡
IP卡 狗仔卡
狗仔卡




 提升卡
提升卡 置頂卡
置頂卡 沉默卡
沉默卡 喧囂卡
喧囂卡 變色卡
變色卡 顯身卡
顯身卡